



1���C�����cϵ�y���B
����C�����M�̑���һ������λ���M�п��ƣ�����һ�����C��PLC�����t�@һ����ͨ�^�ⲿ�Ԅ��\�нӿ��M�С�

PLC�B��
2��ϵ�y�Y��ԭ��
������KRC4��PLC֮�g�܉�����M��ͨӍ����횝M�������c��
�ⲿ�Ԅ��\�з�ʽ����ԓ�\�з�ʽ����һ�_���C����PLC���ƙC����ϵ�y
CELL.SRC�����ⲿ�x��C���˳���Ŀ��Ƴ���
PLC�͙C����֮�g����̖���Q����������ݔ���ݔ������̖���ⲿ�Ԅ��\�нӿڣ�
�l�����C���˵Ŀ�����̖��ݔ��ˣ����_ʼ��ֹͣ��̖������̖�����ϴ_�J
�C���ˠ�B��ݔ���ˣ������b�à�B��λ�á����ϵȵȡ�
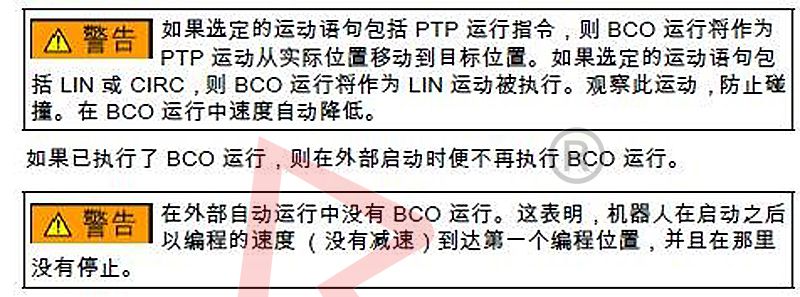
3�����ⲿ���ӳ���İ�ȫ�֪
�x����CELL������횈���BCO�\�С�
4���ⲿ���ӵIJ������E
ǰ��l�������\�з�ʽ�ԣ���ԣ���
�����ⲿ�Ԅ��\�е�ݔ��/ݔ���˺�CELL.SRC���������á�
1.�ڌ��������x��CELL.SRC����CELL����ʼ�K��Ŀ�KRC:\R1��
2.���������O����100%�������Ϟ齨�h���O��ֵ��Ҳ�ɸ�����Ҫ�O��������ֵ����
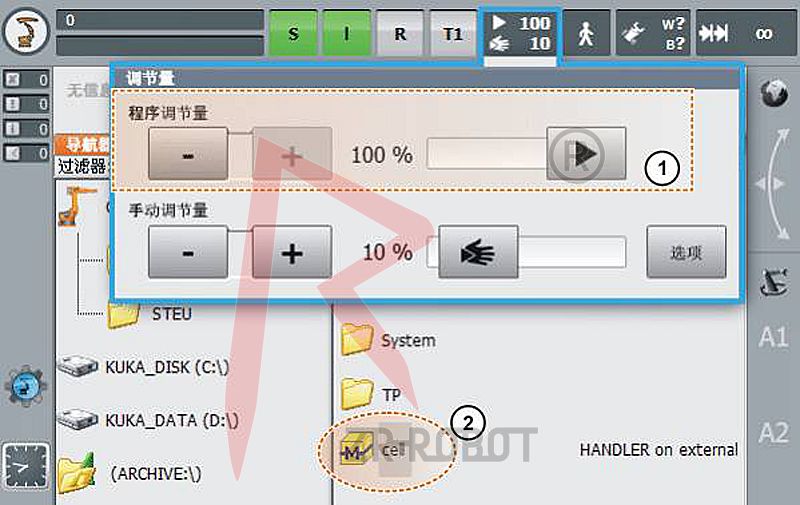
�x��Cell���O���քӱ���
1HOV�O��
2�x��Cell.src
3.����BCO�\�У���ס�_�J�_�P��Ȼ��ס���Ӱ��I��ֱ����Ϣ���@ʾ“���_BCO”��
4.�x��“�ⲿ�Ԅӻ�”�\�з�ʽ
5.����һ������ϵ�y(PLC)̎���ӳ���
5��Cell.src���Ƴ���
������PLC��ݔ�ij���̖�r����Ҫʹ�ÿ��Ƴ���Cell.src��ԓ����ʼ�Kλ���ļ��A“R1”�С��c�κγ�Ҋ�ij���һ�ӣ�Cell����Ҳ�����M�Ђ��Ի��{����������Ļ����Y����횱��ֲ�׃��
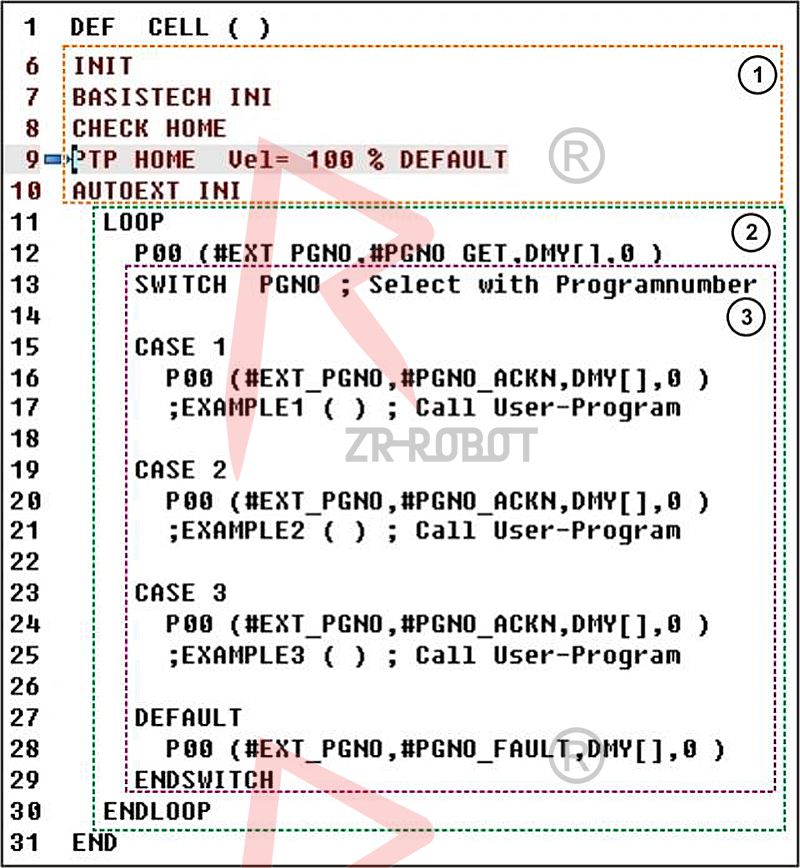
Cell����ĽY�����ܣ�
1����ʼ����Homeλ��
��ʼ�������˅���
����“Home”λ�Ùz��C����λ��
��ʼ���ⲿ�Ԅ��\�нӿ�
2���o��ѭ�h��
ͨ�^ģ�K“P00”ԃ������̖
�M���ѽ��_������̖���x��ѭ�h��
3������̖���x��ѭ�h
��������̖��������׃��“PGNO”�У����D�������ķ�֧(“CASE”)�С�
ӛ��ڷ�֧�еęC���˳����\�С�
�oЧ�ij���̖�����³������D��“Ĭ�J��”��֧�С�
�\�гɹ��Y������Ԅ��؏��@һѭ�h��
6���������E
1.�ГQ��“����”�Ñ��M
2.���_CELL.SRC��
3.��“CASE”���Ќ����Q“EXAMPLE”�Ñ��������ij���̖�{���ij����
���Q��Q���h�����Qǰ�ķ�̖��
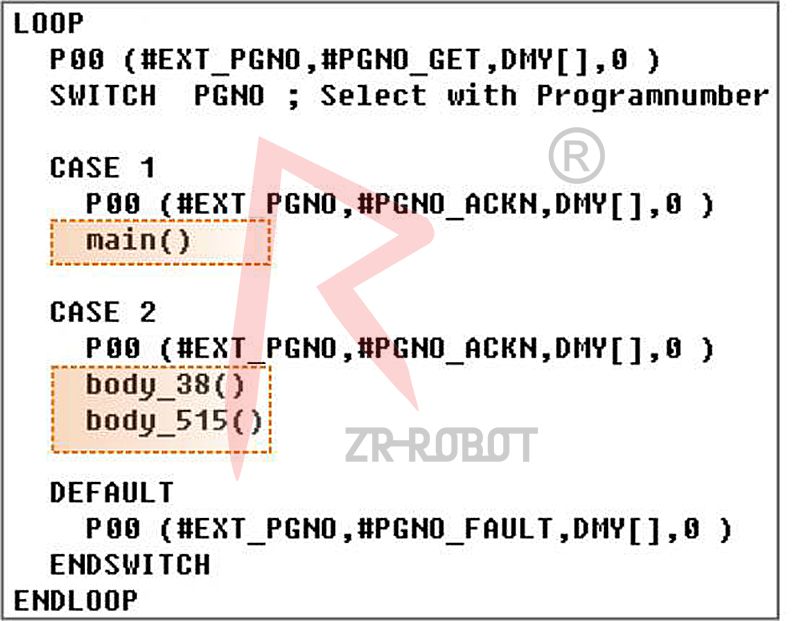
�D11-4:���m���Cell�����e��
7.�P�]��������ġ�