�������C(j��)������δ��(l��i)���ژI(y��)���")
е��C4����ϵ�y(t��ng)�S�ޟo(w��)����")
е��KR280�ŷ�늙C(j��)���S�S")
һ��늚��B�Ӷ����������������ȫ�����ģ��C(j��)�������c(di��n)У��
DANGER �U(xi��n)!
��횰��b�̶��ÙC(j��)���ˣ�����ͨ늲����C(j��)���ˣ���t�ڲ�������(d��ng)?sh��)���r�£��C(j��)��������ˤ��������O(sh��)��p�Ļ��ˆT��ȫ��(w��n)�}��
�C(j��)���˳���ͨ�——늚��B��
���ƹ�(bi��o)��(zh��n)�ͣ��ӿڈDʾ���£�

�C(j��)���˳���ͨ�——늚��B��
�C(j��)���˱��w�ӿڈDʾ���£�

�C(j��)���˳���ͨ�——늚��B��
���Ϟ���ƹ�͙C(j��)���˵�ʾ���ӿڣ����ƹ���̖(h��o)�͙C(j��)������̖(h��o)��һ�ӣ���(du��)��(y��ng)�ӿڕ�(hu��)���в�e������(bi��o)����(hu��)��һ�ӵģ�Ո(q��ng)���⡣
��(du��)��(y��ng)�ӿڵĽӾ�(xi��n)���f(shu��)�����£�
1��X1���^�����ƹ�늽ӿڡ�
��1��KRC4stand&KRC4Midsize&KRC4Extend�������ľ�(xi��n)�ƣ�380VAC����늣�
��KRC4stand&KRC4Midsize�~�����ʣ�13.5kVA
��KRC4Extend�~�����ʣ�����(j��)���ò�ͬ�����ʲ�ͬ��������ҪՈ(q��ng)(li��n)ϵ��(k��)����2��KRC4Compact&KRC4Smallsize���W�ޘ�(bi��o)��(zh��n)���^��220VAC����늣��~������2kVA�����У�220VAC��늲��^�ѽӺã�ֱ�ӽ��뼴�ɣ�
380VAC��늲��^���Ñ�(h��)���룬���£�

�C(j��)���˳���ͨ�——늚��B��
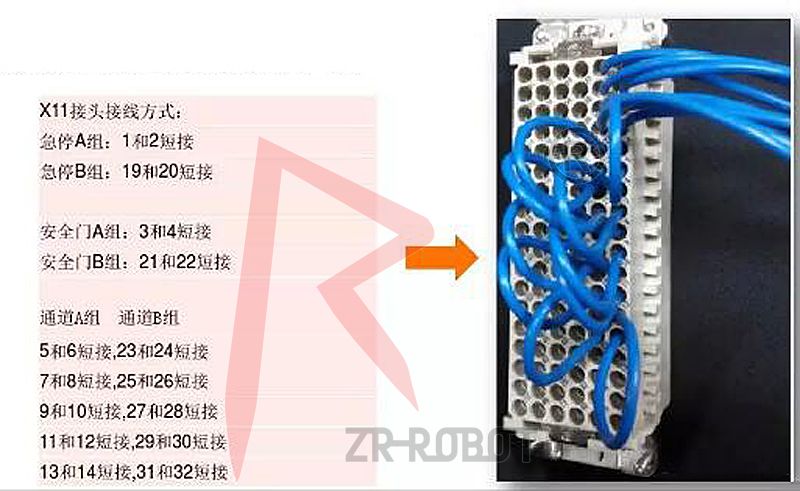
2��X11���C(j��)���˰�ȫ��·�ӿڣ��Ӿ�(xi��n)�D����(j��)���ƹ���̖(h��o)��ͬ���Ӿ�(xi��n)��ʽҲ��һ�ӡ�
��1��KRC4stand&KRC4Midsize&KRC4Extend���ƹ�
��ͣ����ȫ�T(m��n)��̖(h��o)�f(shu��)�������h��������(y��ng)�İ�ȫ�b�������_������Ҫ���룬������(y��ng)��ͨ���̽Ӽ��ɣ�������ʾ��
�C(j��)���˳���ͨ�——늚��B��
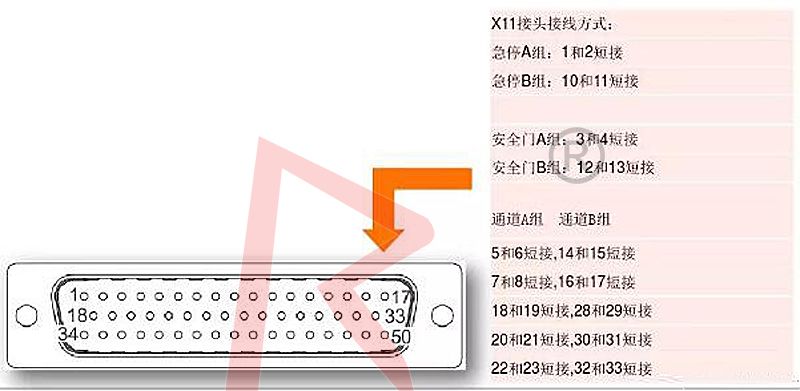
2���C(j��)���˰�ȫ��·�ӿڣ��Ӿ�(xi��n)�D����(j��)���ƹ���̖(h��o)��ͬ���Ӿ�(xi��n)��ʽҲ��һ�ӡ�
��2��KRC4Compact&KRC4Smallsize���ƹ�
��ͣ����ȫ�T(m��n)��̖(h��o)�f(shu��)�������h��������(y��ng)�İ�ȫ�b�������_������Ҫ���룬������(y��ng)��ͨ���̽Ӽ��ɣ�������ʾ��
�C(j��)���˳���ͨ�——늚��B��
3��X51������(xi��n)�������ڿ͑�(h��)��̖(h��o)��(xi��n)��ͨӍ����(xi��n)���W(w��ng)��(xi��n)�ȵĽ��룬Ŀ�ķ��m��ˮ��
4��X20-×30�����ƹ�ӿ�-�C(j��)���˱��w�ӿڣ����ƹC(j��)���˱��w�Ą�(d��ng)����(xi��n)��
5��X21-×31�����ƹ�ӿ�-�C(j��)���˱��w�ӿڣ����ƹ�o�C(j��)���˱��w�Ĕ�(sh��)��(j��)��(xi��n)��
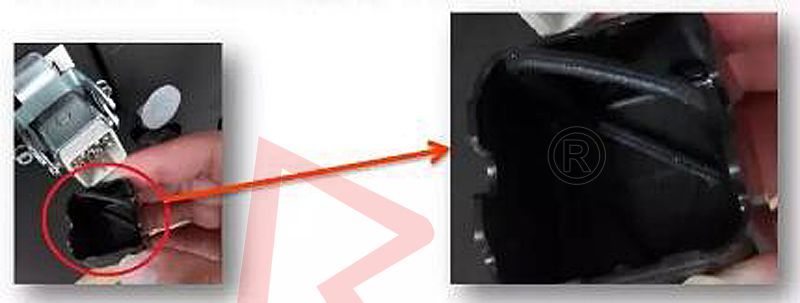
ע�⣺ȡ�C(j��)���˱��wX31���^�ĺ�ɫ���o(h��)�w�r(sh��)���ܷ�Ȧ���S�����o(h��)�wһ�������(l��i)���茢�ܷ�Ȧȡ�������½��뵽×31���^��
6��X19�����ƹ�ӿڣ����ڽ�����(k��)��ʾ����SmartPAD��
7��×32���C(j��)���˱��w�ӿڣ����ڽ����(k��)�����c(di��n)У�����ߣ�У���C(j��)�������c(di��n)��
�C(j��)���˳���ͨ�——늚��B��
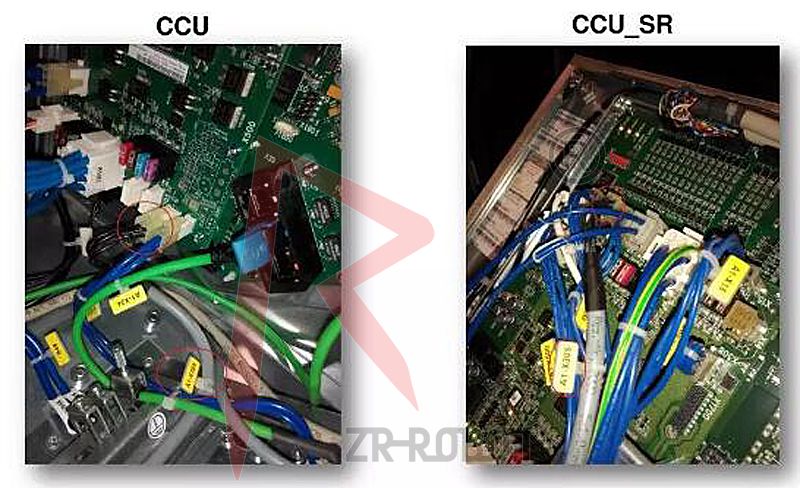
8�����ƹ��(n��i)����늳�X305�ӿڽ��뵽���ƹ���Ɔ�Ԫ��CCU��CCU_SR�����Dʾ����
�C(j��)���˳���ͨ�——늚��B��
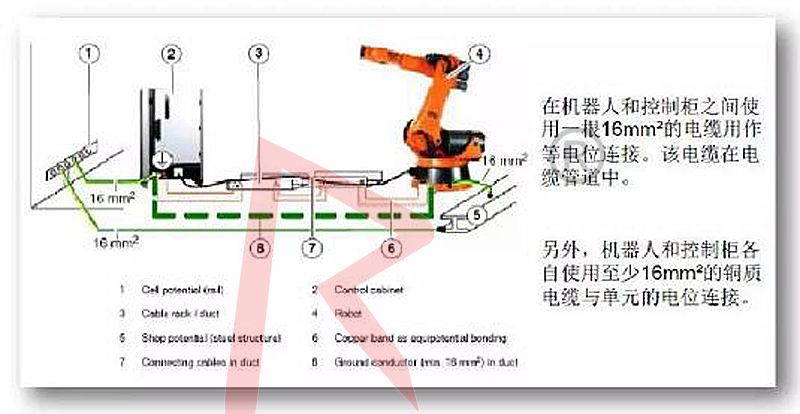
9���C(j��)����ϵ�y(t��ng)�Ľӵأ����D��ʾ�������λ�B��
�C(j��)���˳���ͨ�——늚��B��
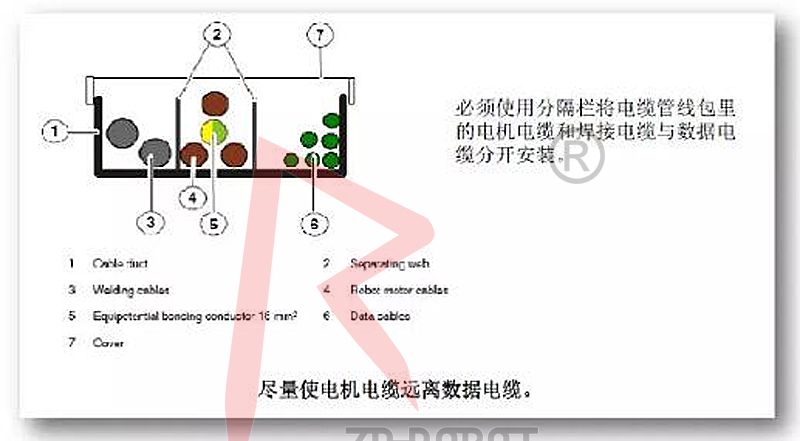
10���C(j��)��������(xi��n)�|�ĬF(xi��n)��(ch��ng)����(xi��n)�����D��
�C(j��)���˳���ͨ�——�������
������늚��B�Ӻ��ڙC(j��)����ͨ�ǰ��������f(w��n)�ñ�y(c��)�����ƹ�Ĺ�늴�С���_�J(r��n)�Դ�](m��i)��ȱ�࣬늉��ĵȼ�(j��)���ϙC(j��)���ˌ�(du��)�Դ��Ҫ�_�J(r��n)�ꮅ��ͨ늡�

��ע�����ƹ���̖(h��o)����Դ������_(k��i)�P(gu��n)��(hu��)������ͬ
�C(j��)���˳���ͨ�——�������
�C(j��)���˳���ͨ�——�������
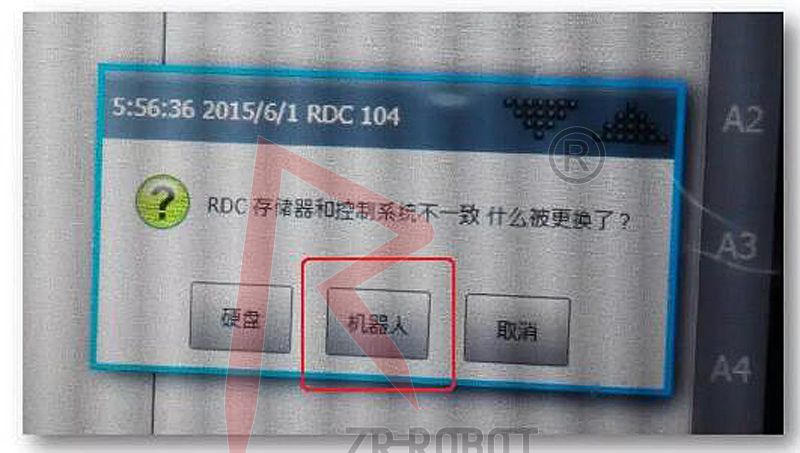
�C(j��)���˵�һ����늣�ʾ�����Еr(sh��)��(hu��)���F(xi��n)���½��棬�Õr(sh��)Ո(q��ng)���ĵȴ��C(j��)�������������ɣ��M(j��n)�뵽KSSϵ�y(t��ng)��DƬ���£�
�C(j��)���˳���ͨ�——�������
�C(j��)����KSSϵ�y(t��ng)���(hu��)��ʾ�x��C(j��)������Ϣ�Č�(du��)Ԓ(hu��)���x��“�C(j��)����”���o�����£�
�C(j��)���˳���ͨ�——�������
�н���һ���E��ͨ�^(gu��)ʾ�����_�J(r��n)������Ϣ���Γ���Ϣ��ʾ�^(q��)�˕r(sh��)һ����(hu��)������D����(bi��o)ʾ�Ĉ�(b��o)����Ϣ�����£�
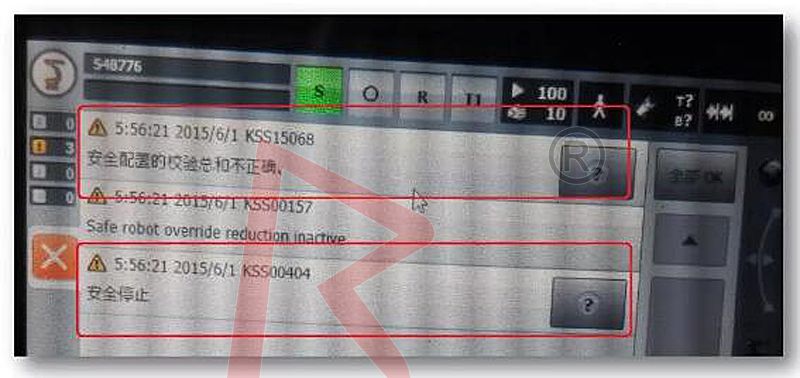
�@�N��Ϣ��ʾ����Ҫ�҂��_�J(r��n)�C(j��)���˵İ�ȫ���á���ijЩ��r�£������(xi��ng)Ŀ���d���C(j��)���˼���r(sh��)��Ҳ��(hu��)��ͬ�ӵ���Ϣ��ͬ��ͨ�^(gu��)�_�J(r��n)�C(j��)���˰�ȫ���Á�(l��i)̎����
�C(j��)���˳���ͨ�——��ȫ����
��ȫ����Ŀ�ģ��Ǟ��˿��ƹ�ϵ�y(t��ng)�Ĕ�(sh��)��(j��)��KSSܛ���ęC(j��)������(sh��)�c��(sh��)�H�C(j��)����һ�¡�
��(du��)�ڳ�����늙C(j��)���ˣ���회�(du��)���M(j��n)�д_�J(r��n)���������������C(j��)���ˡ����E���£�
1����ꑵ�“SafetyMaintenance”����ȫ�{(di��o)ԇ�ˆT����
�M(j��n)�룺“���ˆ�����>�Ñ�(h��)�M”���x�Ќ�(du��)��(y��ng)�Ñ�(h��)�M��ݔ�����ܴa“kuka”��ɵ�ꑡ�

�C(j��)���˳���ͨ�——��ȫ����
��ȫ����Ŀ�ģ��Ǟ��˿��ƹ�ϵ�y(t��ng)�Ĕ�(sh��)��(j��)��KSSܛ���ęC(j��)������(sh��)�c��(sh��)�H�C(j��)����һ�¡�
��(du��)�ڳ�����늙C(j��)���ˣ���회�(du��)���M(j��n)�д_�J(r��n)���������������C(j��)���ˡ����E���£�
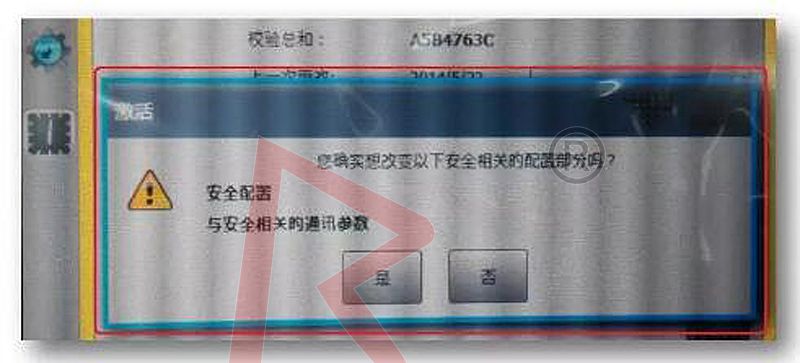
2���M(j��n)��ˆ�“���ˆ�>����>��ȫ����”������Џ������µĽ��棬�Γ�“��”����D
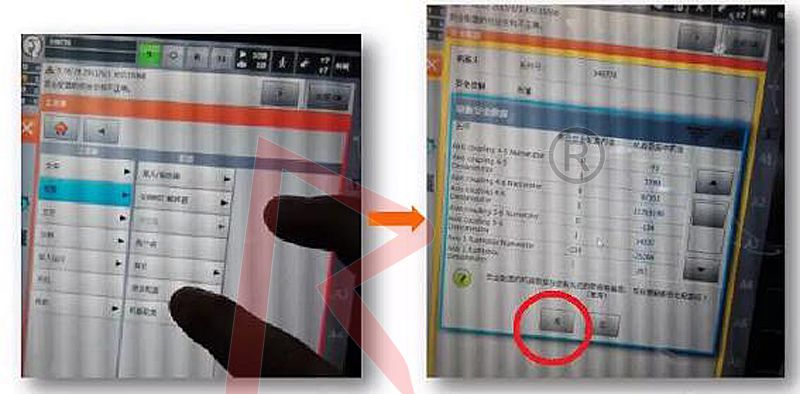
�C(j��)���˳���ͨ�——��ȫ����
��ȫ����Ŀ�ģ��Ǟ��˿��ƹ�ϵ�y(t��ng)�Ĕ�(sh��)��(j��)��KSSܛ���ęC(j��)������(sh��)�c��(sh��)�H�C(j��)����һ�¡�
��(du��)�ڳ�����늙C(j��)���ˣ���회�(du��)���M(j��n)�д_�J(r��n)���������������C(j��)���ˡ����E���£�
3����������ɲ���ʾ���������(hu��)����“�����ų�����”��(du��)Ԓ(hu��)���x��“�C(j��)���˻�RDC�惦(ch��)���״�Ͷ���\(y��n)��”�ֶΣ�Ȼ��Γ������“�F(xi��n)�ڼ���”��
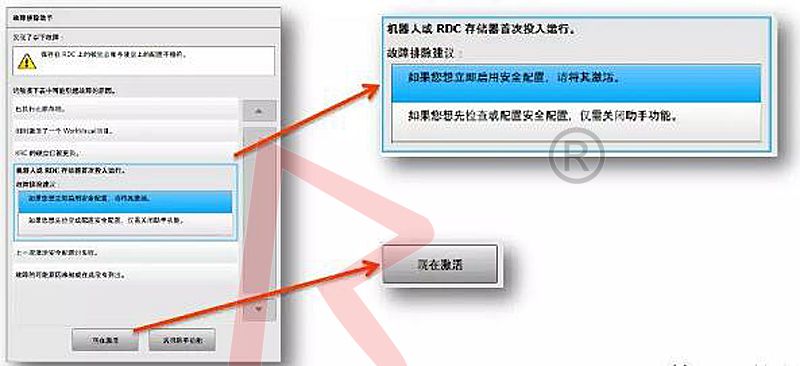
�C(j��)���˳���ͨ�——��ȫ����
��ȫ����Ŀ�ģ��Ǟ��˿��ƹ�ϵ�y(t��ng)�Ĕ�(sh��)��(j��)��KSSܛ���ęC(j��)������(sh��)�c��(sh��)�H�C(j��)����һ�¡�
��(du��)�ڳ�����늙C(j��)���ˣ���회�(du��)���M(j��n)�д_�J(r��n)���������������C(j��)���ˡ����E���£�
4���ڏ�����(l��i)�Ĵ_�J(r��n)��(du��)Ԓ(hu��)���x��“��”��
5���ȴ���ȫ����(sh��)������ȫ���ص�KSS���棬Ȼ��Γ��_�J(r��n)������Ϣ��������늲����C(j��)���ˡ�
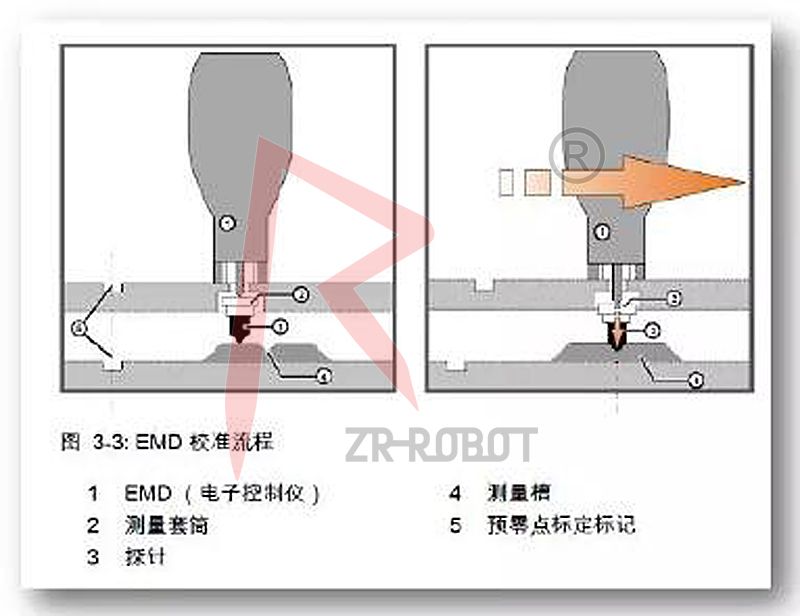
�C(j��)���˳���ͨ�——�C(j��)�������c(di��n)У��
��(j��ng)�^(gu��)��ȫ���õIJ������Еr(sh��)߀��(hu��)�Ј�(b��o)����Ϣ“���c(di��n)У��Ax”��X��ʾ�ڎׂ�(g��)�S�Gʧ�����c(di��n)���@�r(sh��)��ֻ��Ҫ�����C(j��)�����M(j��n)�����c(di��n)У�����ɡ�
���c(di��n)У���ķ�ʽ��2��(g��)����һ���У������EMD����M(j��n)EMD�����ǧ�ֱ���
���c(di��n)У����ǰ����C(j��)�����S�Ƅ�(d��ng)���A(y��)У�����c(di��n)��λ�ã����D����ÿ��(g��)�S�Ę�(bi��o)�R(sh��)��(hu��)�в��

�C(j��)���˳���ͨ�——�C(j��)�������c(di��n)У��
���c(di��n)У����ԭ������۵�λ�ã�����ԓ�S�C(j��)���˙C(j��)е���c(di��n)��λ�á����У�����߸���(j��)�������E�������ҵ����c(di��n)��ǧ�ֱ�����ք�(d��ng)��ʽ����Ҫ����ǧ�ֱ��P(p��n)“ָ�”�Ĺ��c(di��n)λ�Á�(l��i)�_�J(r��n)��